���İ�ȨΪ���ʵ���Ƽ��������У�����ת������ϵ���ʵ���Ƽ������༭��
ժ Ҫ����Զ�̬�˻����ڳ����İ�ȫ�������⣬�������֪�����ߡ����������㼶Эͬ�Ż���ܡ��ÿ���ں���ģ̬��֪������Ӧ�����봥������������ʵ�ְ�ȫ��Ч��ͳһ�������˶�Դ�칹��֪ģ�ͣ�ʵ�����Ӿ���������������ݵ�ʱ�ն��룬��ײԤ��ȷ�ʴ�92.3%������˶�̬�迹��������ͻ���Ӵ�ʱ��ֵ��ײ����64%������С��-CNN�������ģ̬����ӳ����ƣ������߸�֪ȷ��������92.7%�������ӳ٣�15ms���ೡ��ʵ�������ϵͳ�����������ڴ�ͳ������
�ؼ��ʣ��˻�Э����ȫ������������ǿ����ģ̬��֪�ںϣ�����Ӧ�迹���ƣ�ʱ�ն���
doi��10.12045/j.issn.1007-3043.2025.07.004
����
�����˹�����������˼���������ںϣ����������ˣ�Embodied Robots������ʵ��������ʵ��Ӧ�ó�������ҽ�ƿ�������ͥ����ҵЭ�����������˲�����Ҫ��ɾ������������������������ڹ����ռ���ʵ����Ȼ����ȫ��Эͬ���������֡��˻����ڡ���Human-Robot Symbiosis����Ը������־�Ż����˼������ӡ�����������ữ���ķ�ʽת�䡣Ȼ�����ڶ�̬�ǽṹ�������У����������İ�ȫ���뽻����Ȼ��֮���ì�ܣ���Ϊ��Լ�˻����ڷ�չ�ĺ�����ս�����ľ۽��ھ������������˻����ڳ����µİ�ȫ��������������������������ּ��ͨ����ģ̬��֪�ں�������Ӧ���Ʒ�����������˰�ȫ���뽻��Ч�ʵıջ�ϵͳ��
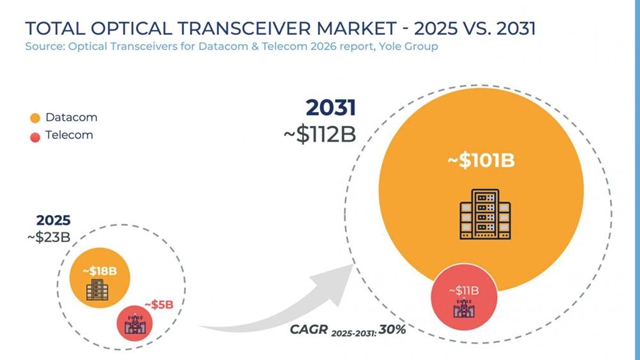
�˻����ڵĺ���Ŀ����ͨ���������������������ռ䡢��֪�����˫����ʵ�֡�1+1>2����ЭͬЧӦ���ݹ��ʻ��������ϻᣨIFR��ͳ�ƣ�2023��ȫ��Э���������г���ģ��ͻ��23����Ԫ������ҽ�ƻ������ͥ������������ٸߴ�35%��Ȼ�����������������еİ�ȫ����ʼ���Ǽ���������ٵ�ƿ�������磬�ڿ���ѵ�������У�������������ʩ����ѧ�̼��Ը��������˶���������ͻ���Լ��⾷�ο��ܵ��¹ؽ����س�����ֵ���ڹ�ҵЭ�������У�������������ڹ���װ������ҵʱ������ײ�������������˺�������ISO/TS 15066�������岻ͬ��λ����ͷ�����ֱۣ�����ʹ��ֵ������������Χ��1~150N����Ի����˵�ʵʱ�Ӵ�������������Ͽ�Ҫ��ǰ�����������˵İ�ȫ������������������ì�ܣ���һ��������֪�ľֲ�����������Ϊ��ȫ�������֮���ì�ܣ��������ͳ���Կ��Ƶĸ߾�������������Ӵ���˳��֮���ì�ܣ������������źŵĸ�ά�����뷴��ͨ������������֮���ì�ܡ���Щì�ܵ�������ϵͳ�ڶ�̬�����г����롰���ȱ��ء���Ƶ���ж�����ð�ռ�����������ȫԼ������������������ˣ���ι����߱����˴�����֪��������̬����Ԥ����������������Ӧ���������Ļ�����ϵͳ���ѳ�Ϊѧ�����빤ҵ�繲ͬ��ע�Ľ��㡣
�����о�Χ���˻�������ȫ��Ҫ�ӻ�����֪���˶��滮��Ӵ�����3������չ�����ڻ�����֪���棬�����Ӿ�SLAM�������״��ı����㷨�ѽ�Ϊ���죬����������ܹ�������ϰ����ͻ���Ľ�����Ӵ����������ֱۿ��ٻӶ�������Ӧ�ӳٿɴ�200~500ms��Haddadin�����������ײ�����ͨ���ؽ����ع۲�ʵ����ײʶ�𣬵�����ֵ�趨���������鶯��ѧģ�ͣ��ڸ���ͻ����������ų������ײ������С����˶��滮���棬ʱ���˶���Ԫ��DMP����ģ��Ԥ����ƣ�MPC�����㷺Ӧ���ڶ�̬�켣�������������㷨���������˶����ϸ�˹�ֲ������Դ����߶ȷǽṹ���������������ͯ����Ԥ����ܶ��ȣ��������������������о������ٸ���ļ���ƿ�������д��������������ڿռ�ֱ��������Ƶ�ʣ����Բ����ٻ��ƻ�С�α��źš��ڷ������Ʒ��棬���������̼�װ�����ܴ��ݻ���������Ϣ����ȱ���ԽӴ�����С�������������Ķ�ά����������Kaciroti���˿����Ĵ�����Ⱦ�㷨ͨ��ʱ�䡪�ռ��ֵ�������������ԣ��������ݴ����ӳ��Ըߴ�30~50ms�����²������ڽӴ�����������ʱ����ʩ�����ԡ�
��Щ�����Խ�ʾ�˵�ǰ�˻�����ϵͳ������ȱ�ݡ�
a����֪�����Ƹ��ѡ�������֪ģ����ִ��������ȱ��Эͬ�Ż�����ȫ���Զ��������鲹����������Ԥ�⡣
b��������Ϣȱʧ������ϵͳ���ܴ��������ƽӴ��źţ������ֽӴ���ͼ��
c�����Ի����䲻�㡣��ȫ��ֵ����ͳһ����δ�����û����䡢���ʲ������ʹ���жȵ�Ӱ�졣
����������⣬�������һ�֡���֪�����ߡ����������㼶��ȫ������ܣ�����Ĵ��µ�������¼����档
a����ģ̬��̬��ײԤ��ģ�͡��ں�RGB-D����ij�������ָ���Ե���Ƥ���ķֲ�ʽ�Ӵ��������IMU����״̬������ݣ���������ʱ�ձ�Ҷ˹��������ײ����ʵʱ����ģ�ͣ�ʵ�ֺ��뼶����Ԥ����
b����ն��迹�����㷨����ƻ���������ŵ���ȶ��Ե�����Ӧ�迹�����������ݽӴ����ݶȶ�̬�����ؽڸնȣ�������ִ�о��������尲ȫ֮��ʵ������������ƽ�⡣
c���������롪������ǿ��������������MEMS�ṹ�ij����ܶȴ������У����С���任��CNN����������ȡ�㷨����ԭʼ�����ź�ѹ����10%���£��Ҳ���ʧ�ؼ���Ϣ��ͬʱ����ƶ�ģ̬��������װ�ã�ͨ������̼����ȷ����Ŀ�ģ̬ӳ�䣬���������߶ԽӴ������Ŀռ�����������ʵ����������ķ�����UR5e��е����Humanoid���������ƽ̨��ȡ������Ч������ײ����ֵ����64%�����������ӳٿ�����15 ms���ڣ��û��������Ч������27%����Щ��չΪ�˻����ڴ����۹���������ģӦ���ṩ�˹ؼ�����֧�š�