���İ�ȨΪ���ʵ���Ƽ��������У�����ת������ϵ���ʵ���Ƽ������༭��
ժ Ҫ���ڲִ����ܻ������У��ִ�������̬�����Ե�豸��������Ӱ�����ʶ�𡣹��ձ仯�������ڵ��ѵ��������������Լʶ��ȷ����Ч�ʣ�Ϊ�������ģ̬�����ں���̬����Ӧ��ܣ�����RGB-Dͼ�����������ƿ�ģ̬���������������ںϿռ伸�����������������ݻ�������ʵʱ�Ż���̬Ȩ�أ����ͨ����֦��֪ʶ����Эͬ�������������ܹ�����ģ�����ѹ����ԭ����30%��ʵ������������ģ̬�����ȵ�ģ̬ȷ������8.2%�����ڵ�������ȷ�ʴ�96.5%��������ģ��ȷ��Ϊ98.1%�������ٶ�����2.3����
�ؼ��ʣ��ִ�����ʶ�𣻶�ģ̬�ںϣ�������ģ�ͣ���̬������Ӧ
doi��10.12045/j.issn.1007-3043.2025.06.001
����
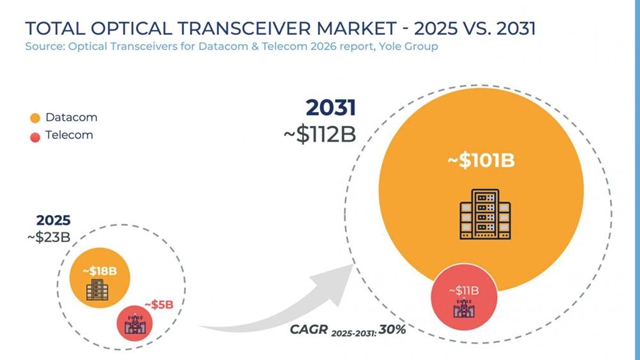
��ȫ�ÿ��ٷ�չ�ĵ��£��ִ�������ҵ���������ܻ�ת���Ĺؼ�ʱ�ڡ�Statistaͳ��������ʾ��2024��ȫ��ִ��г���ģ�Ѹߴ�3200����Ԫ������һ�Ӵ���г���ϵ�У�����ʶ���ȷ�ʶԲִ���Ӫ�ɱ�����������Ҫ��Ӱ�졣�о�����������ʶ��ȷ��ÿ����1%������Ϊ��ҵ����23����Ԫ������ġ�Ȼ�����ִ������ļ��˸�����Ϊ����ʶ������˾���ս���ӹ��������������ִ������еĹ���ǿ�ȱ仯��Χ������0~2000lux���������־��ҵĹ��ձ仯������Ӱ������Ӿ������Ļ���ʶ��Ч����ͬʱ������Ķѵ��ڵ����Ҳʮ�ֳ���������ڵ��ʿɴ�70%����ʹ�ô�ͳ���Ӿ�ʶ������ȷ��ȡ�����������Ϣ�����⣬��Ե�豸��Ϊ�ִ����ܻ��Ĺؼ��նˣ�����������Ҳ��Ϊ��Լ����ʶ������չ����Ҫ���ء��ִ�����ʶ������ͼ1��ʾ��

�����еĻ���ʶ�����У���ģ̬RGBģ�ͣ���㷺Ӧ�õ�YOLOv8�����ڵ������µ�ȷ�ʵ���90%�������㹤ҵ���ĸ߾�����������Ʒ�����Ȼ�ڼ��νṹ��Ϣ��ȡ�Ͼ������ƣ�����PointNet++����ģ�ʹ���������Ϣȱʧ�����⣬������Ի����ʶ��ȫ�档����������ģ������CPNet��ģ�����ܽ����ѹ��40%����������ʧȴ����5%������ƽ��ģ������뾫��֮��Ĺ�ϵ��ͬ������Ӧ��ҵ�������ϸ�Ҫ��
����������⣬���о����һ�ִ��µĶ�̬��ģ̬�����ں����Ե������Эͬ������ͨ�����ļ������£�ͻ�����м���ƿ����һ���棬��ƻ��ڻ������������ݵ�����ӦȨ�ػ��ƣ�ʵ�ֶ�̬��ģ̬�������롣��һ���ƴ����˴�ͳ��̬�ںϵľ��ޣ��ܹ����ݹ��ձ仯ʵʱ����ģ̬Ȩ�أ��Ӷ��ڲ�ͬ���������¶�����Ч�ں϶�ģ̬��Ϣ����һ���棬���������ʧ������ʵ�ּ�֦������Эͬ�Ż����÷�����ͨ����֦�Ľṹ��ϡ������֪ʶ���������Ǩ�����ϣ��ڴ��ѹ��ģ�������ͬʱ������ȵر���ģ�͵�ȷ�ʡ����⣬Ϊ�˸��õ����乤ҵ���������о������˰������λ���������������������ǿ���ݼ���ʹ��ģ�����ڵ������µ�ȷ�ʴﵽ96.5%������ISO 2382-27�еĹ�ҵʵʱ�Ա����ӳ�<50ms�������о�ʹ�ּ�Ч��������27%��Ϊ����������������Ӿ�Ӧ�ð�Ƥ�顷�ṩ�˺��ļ���֧�ţ��ƶ��˲ִ����ܻ�������ʵ��Ӧ���뷢չ��