大家可能都很好奇,人手是怎么实现对机器人的控制的,或者远程控制的,中间的通信原理是怎么样的?以下就让UR机器人小编给大家科普一下吧。
图源UR机器人官网
UR机器人可以与工控机间通信,具备TCP/IP通讯模块的PLC以及嵌入式系统进行通讯。
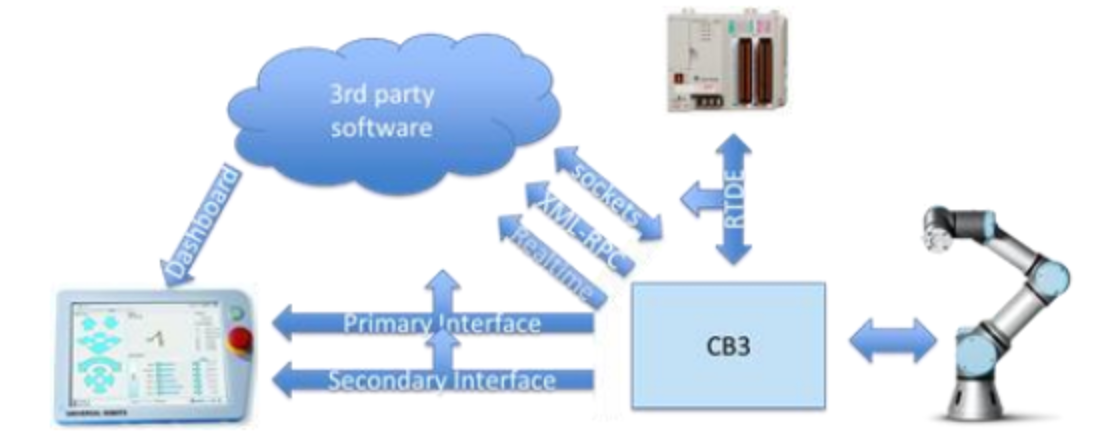
UR机器人提供的通讯接口如下:
图源UR机器人官网
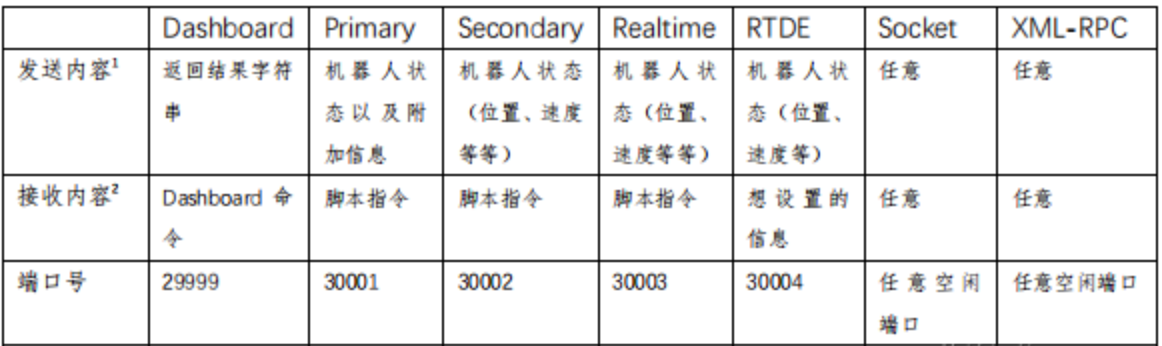
1、Dashboard(29999)接口,负责接收上位机指令,执行机器人初始化、加载程序、开始和暂停程序运行以及设置用户角色等操作;
2、Primary和Secondary(30001和30002)接口,对外发送机器人的状态信息(机器人位置,IO,运行状态等);
3、Realtime(30003)接口,往外发送机器人的详细状态信息(位置,速度,关节电流,力矩等),同时也可以接收上位机发送的脚本指令并立即执行;
4、RTDE(30004)接口,往外发送机器人的详细状态信息(位置,速度,关节电流,力矩等),也会接收配置的输入信息(IO,寄存器等);
5、Socket通讯,通过脚本指令与上位机通讯;
6、XML-RPC通讯,一种通过XML格式传输结构化数据的协议,其优点在于传输的数据是结构化的,无需用户自己进行序列化和解析操作。
7、Modbus-TCP通讯
UR机器人支持 Modbus-TCP ,既可以作为客户端,也可以作为服务器。
UR 机器人作为客户端,只需配置好网络,然后使用相应的脚本即可 。
UR 机器人作为服务器,可以提供机器人当前位置,速度等状态信息,也提供通用寄存器可用于互相通讯(例如相机将数据传输给机器人)。

图源UR机器人官网
以上是UR机器人如何与PC通信的接口介绍,大家可以根据实际需求选择最佳的通讯方式 。对于每种通讯方式的详细介绍,可访问 UR 官网了解更多哦。UR机器人官网www.universal-robots.cn